| CCGS
Amundsen EM300 Deep Water Trials - 2500m contour, Labrador Sea October 3rd-4th 2004 |
Between
the 2nd and 7th of October 2004, CCGS Amundsen steamed in transit from
Ungava Bay to Quebec City, via the Labrador Sea. The vessel was
deliberately diverted to an offshore route, roughly along the 2500m
contour in order assess the bottom tracking capability of the
hull-mounted Simrad EM300 30 kHz multibeam sonar. During the period in
deep water, the vessel steamed through a 40 knot gale but the more
southerly section took place with winds as light as 15 knots. 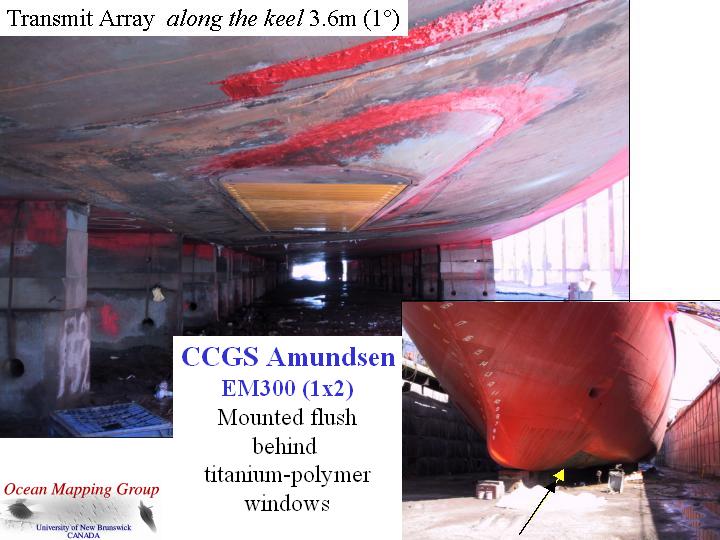 |
<<
CCGS Amundsen EM300 transducer mount
flush to hull behind ice-reinforced windows MV Ocean Alert EM300 transducer mount >> on gondola, proud of hull, no acoustic windows |
 |
 From
about 60.75 N until 56.60 N the Amundsen approximately tracked the
2500m contour (as derived from ETOPO5). The aim was to assess the
bottom tracking performance of the flush-mounted, ice-reinforced EM300
system on the Amundsen under open ocean conditions. Whilst the data
could be useful towards assessing the approximate location of the 2500m
contour (and all the data is being made publicly available), no
external funding
was provided for these trials and thus the cost of
the diverted transit was borne by
the ArcticNet research program.
From
about 60.75 N until 56.60 N the Amundsen approximately tracked the
2500m contour (as derived from ETOPO5). The aim was to assess the
bottom tracking performance of the flush-mounted, ice-reinforced EM300
system on the Amundsen under open ocean conditions. Whilst the data
could be useful towards assessing the approximate location of the 2500m
contour (and all the data is being made publicly available), no
external funding
was provided for these trials and thus the cost of
the diverted transit was borne by
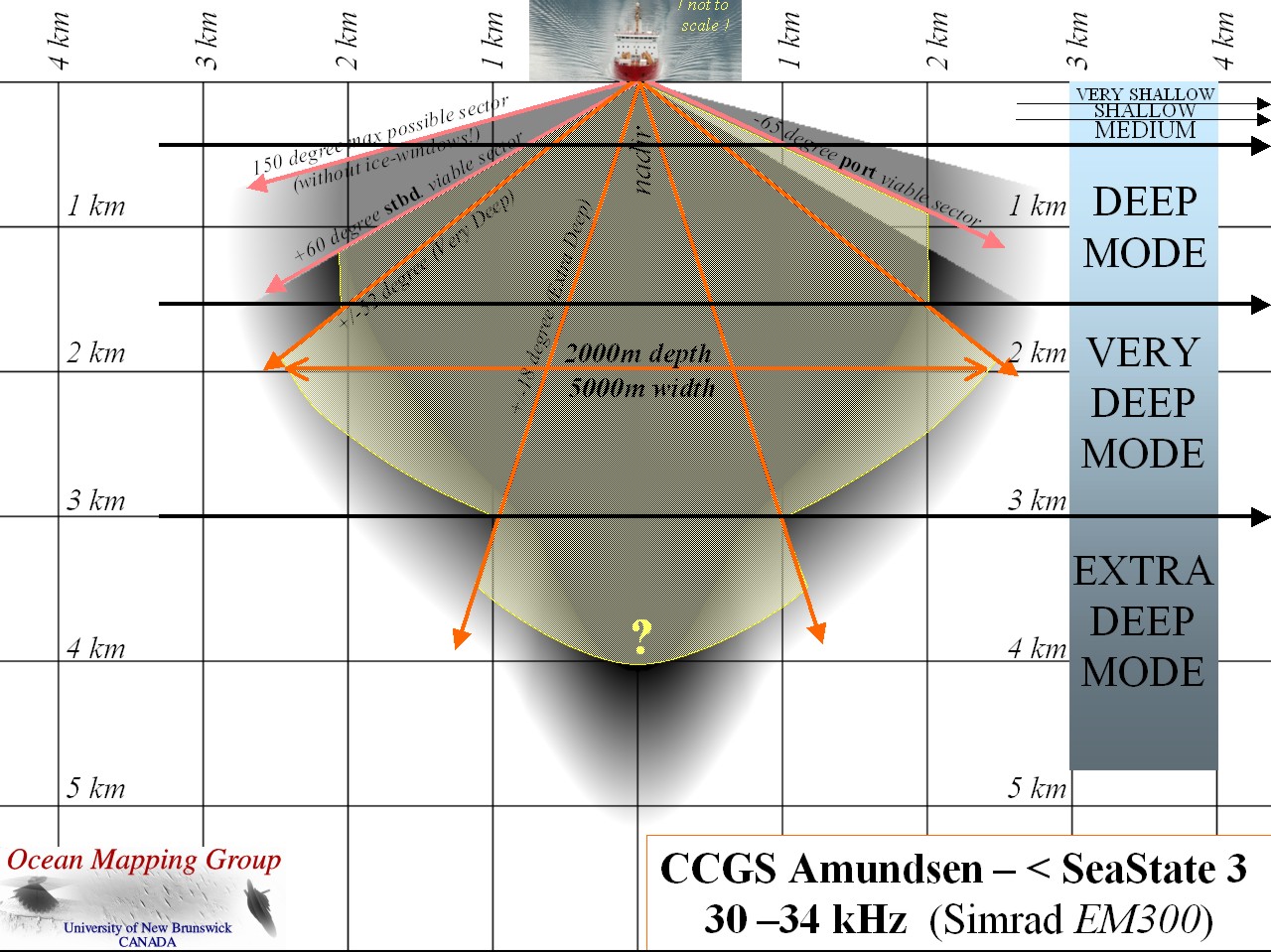
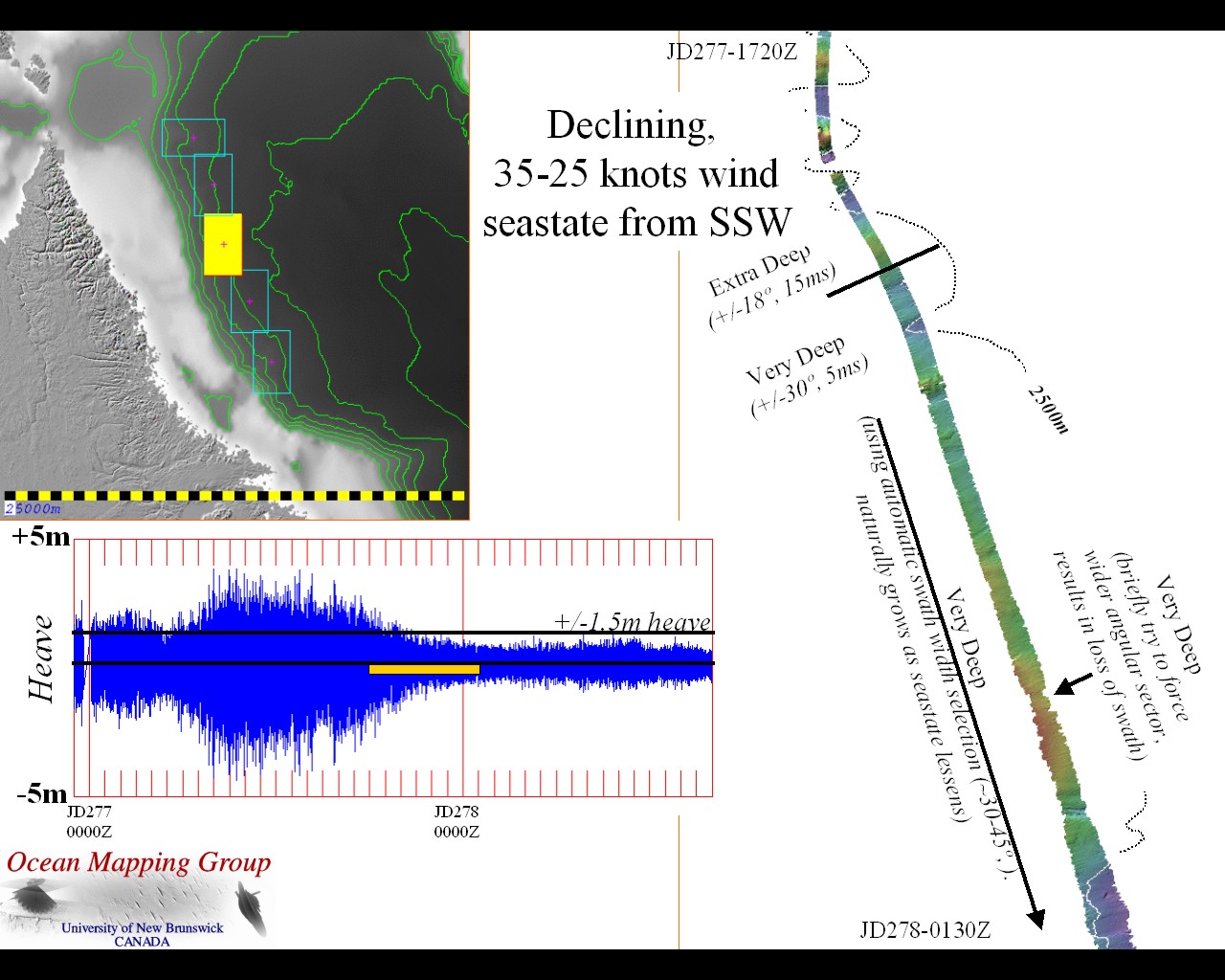
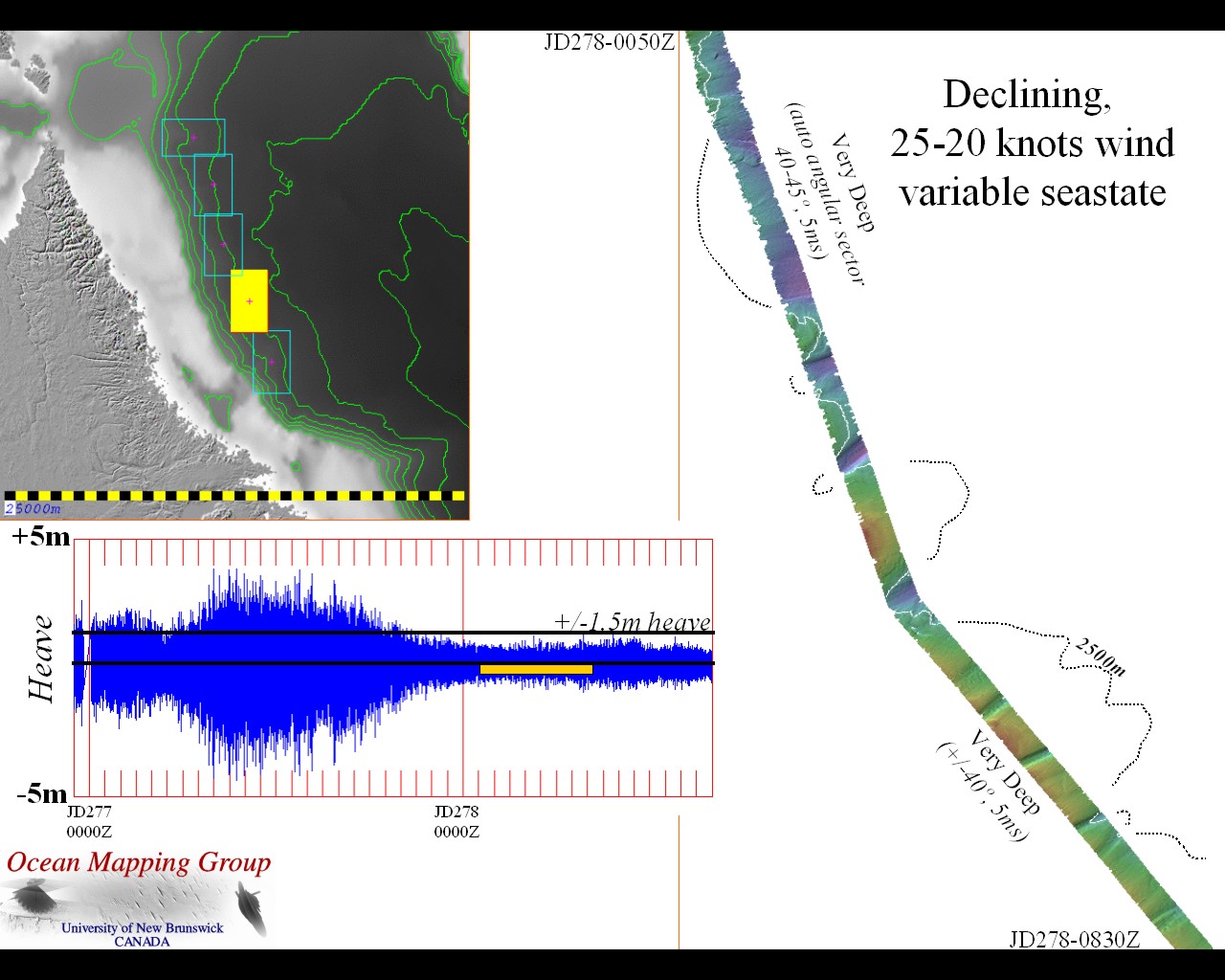
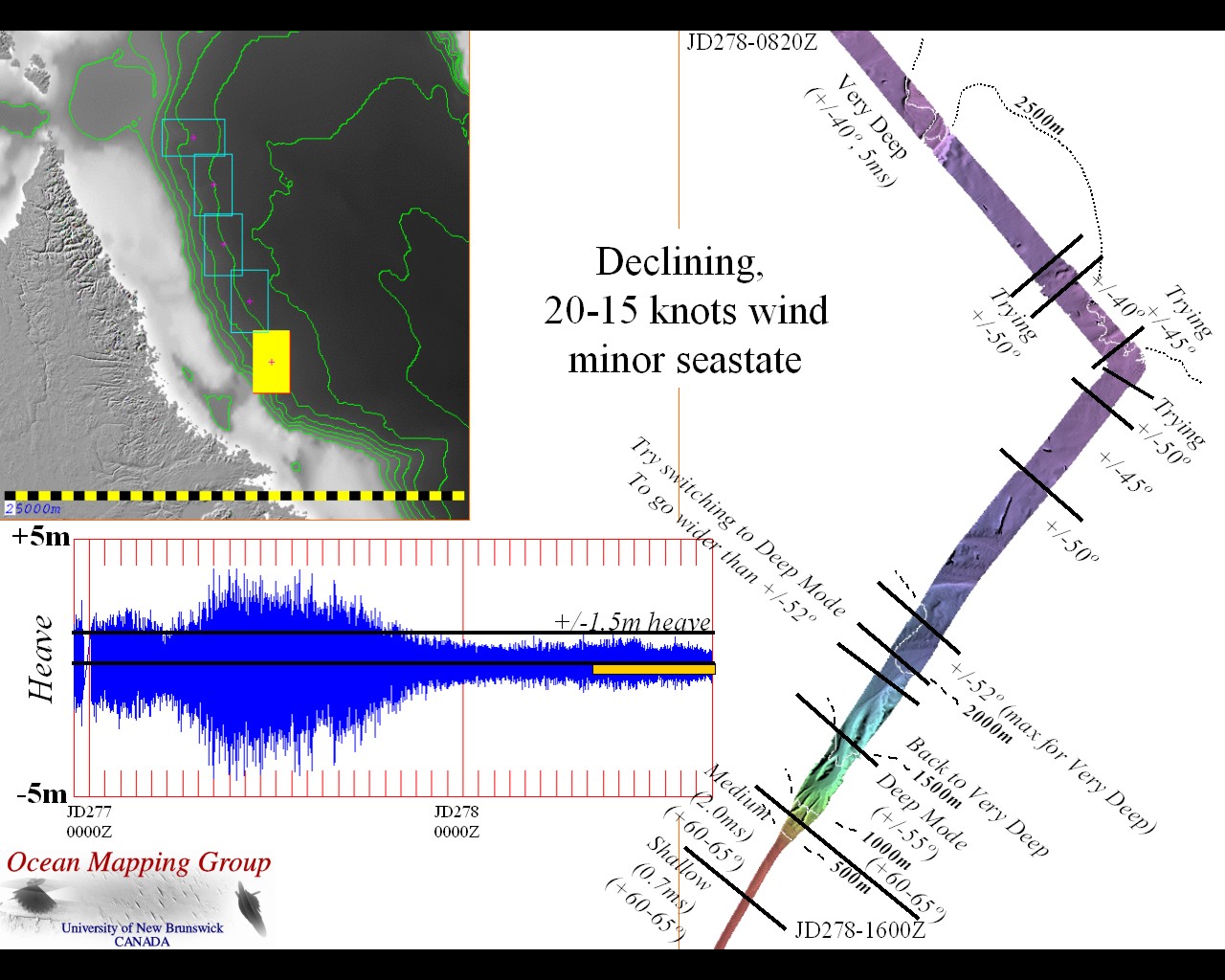
the ArcticNet research program.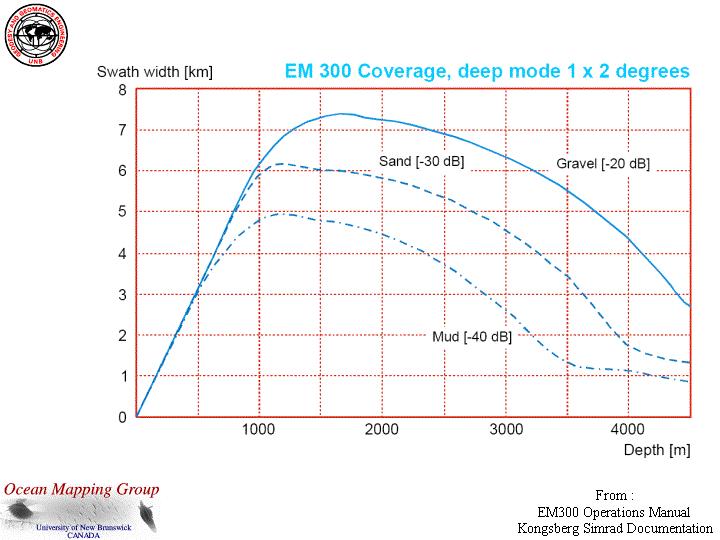 The
main thing to note is that any EM300 is generally attenuation
limited,even in low seastates at depths greater than ~ 1000m. Due to
the ice-reinforced windows, steering beyond ~ 65 degrees, relative to
the receive array is not possible anyway. As the array is tilted to
port, standardly a sector of +(stbd) 60 degrees and -(port) 65 degrees
is acquired in water depths less than 1000m. At depths beyond ~
800m, there are three ping modes:
The
main thing to note is that any EM300 is generally attenuation
limited,even in low seastates at depths greater than ~ 1000m. Due to
the ice-reinforced windows, steering beyond ~ 65 degrees, relative to
the receive array is not possible anyway. As the array is tilted to
port, standardly a sector of +(stbd) 60 degrees and -(port) 65 degrees
is acquired in water depths less than 1000m. At depths beyond ~
800m, there are three ping modes: |
|
|||
 |
|
|||
 |
|
|||
 |
|
|||
 |
|
|||
 |
Example
data from
2000-2200m using Very Deep Mode. A stable 5000m swath is being acquired, with little apparent loss of resolution from nadir to the far range. Excellent depiction of valley flow morphology and detail on the ridge-like feature. Note that the backscatter data has no evidence of any bubble wash down events. 50m contours superimposed. |
|||
 |
Relative
Coverage, Attenuation limited EM300 v. EM120 At 2500m, the EM300 swath is clearly attenuation limited with no more than a +/- 40 degree swath available. It is worth contrasting with the swath width that could be provided using a 12 kHz EM120. At these depths, the EM120 could potentially provide a +/- 75 degree swath. Exactly how wide a swath width could be used to achieve the required data accuracy, however, depends on external ancillary error sources including motion sensor accuracy and alignment and water column control. Based on other deep water surveys, a realistic maximum sector used by a 12 kHz system would be ~ +/-60 or +/- 65 ( an increase in coverage of more than a factor of 2.0 to 2.5 x). By comparison, the US UNCLOS surveys are being performed using three different 12 kHz sonars:
|
|||
 |
Relative
sounding density, EM300 v. EM120 Whilst a 12 kHz system would clearly provide a greater mapping (coverage) efficiency, it should be borne in mind that a wider swath sector would require both :
|